
Statics and Torque
60 The First Condition for Equilibrium
Learning Objectives
- State the first condition of equilibrium.
- Explain static equilibrium.
- Explain dynamic equilibrium.
This means that all external forces cancel out. Since forces are vector quantities, this condition must be satisfied along each axis of motion. For systems in two dimensions, this requires:
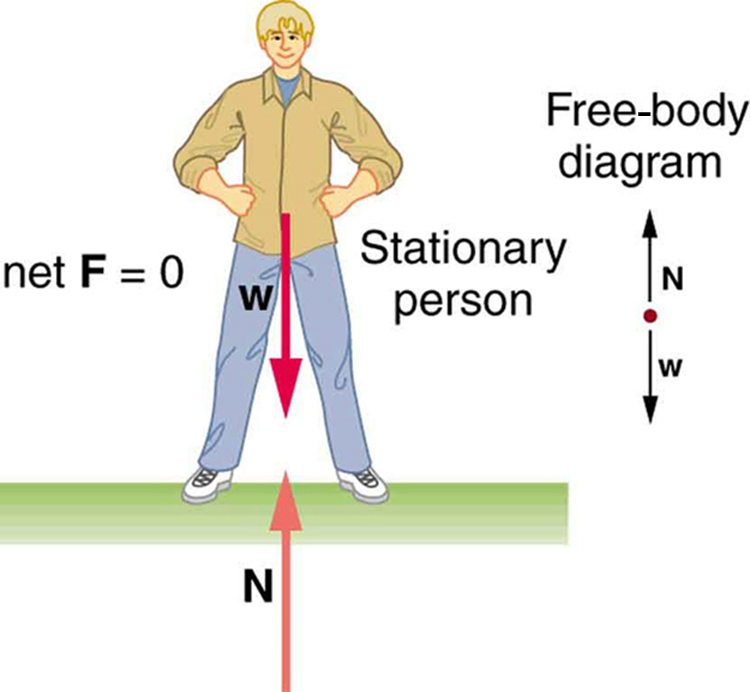
Consider Figure 60.1, which shows a person standing still. The upward normal force from the ground exactly balances the downward gravitational force (weight), so the net force is zero. The person is in static equilibrium, meaning there is no motion and no acceleration.
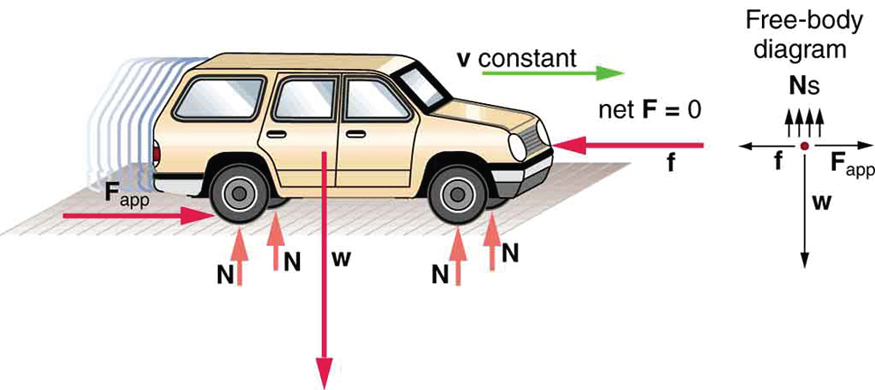
Now consider Figure 60.2. A car moving at constant velocity has balanced horizontal and vertical forces. The horizontal applied force is balanced by air resistance (a form of friction), and the vertical weight is balanced by the normal forces from the road. This is an example of dynamic equilibrium: the object moves but does not accelerate.
It’s important to note that having zero net force does not necessarily mean there is no motion. It simply means there is no change in motion—no acceleration. However, for a system to be truly in equilibrium, force balance alone is not sufficient. The location where a force is applied also matters, especially when considering rotational effects.
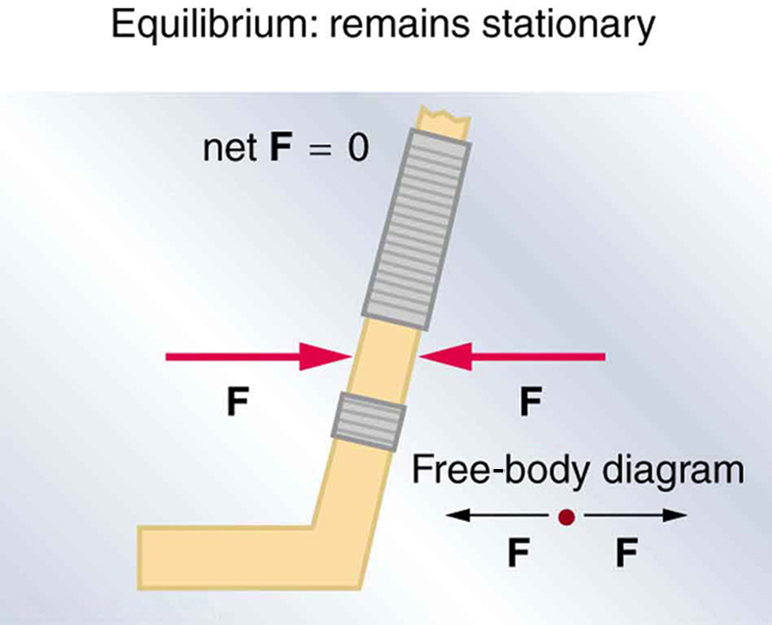
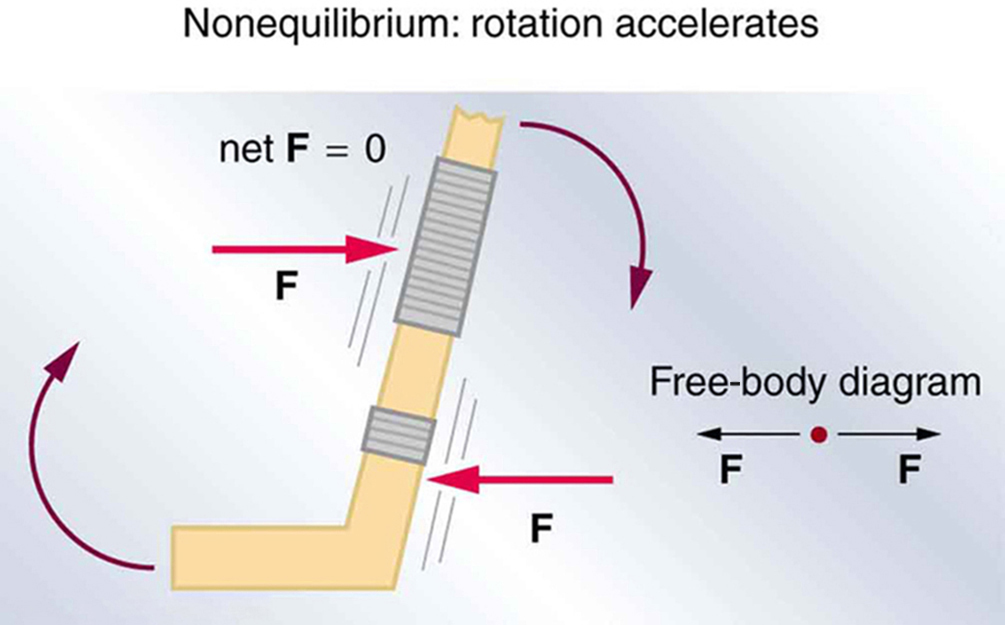
Take a look at Figure 60.3 and Figure 60.4. In both cases, two equal and opposite forces act on a hockey stick. In Figure 60.3, the forces act along the same line of action, so the stick stays still—this is true equilibrium. But in Figure 60.4, the same forces act at different locations, producing a torque that causes the stick to rotate. Even though [latex]\text{net}\,\vec{F} = 0[/latex], the system is not in equilibrium because it experiences angular acceleration. We’ll return to this in the next section.
PhET Explorations: Torque
Use this interactive simulation to explore how torque influences rotational motion. Observe how torque interacts with moment of inertia and angular acceleration, key concepts in understanding how biological joints move, how tools apply force, or how muscles create rotation about bones. This virtual lab allows you to manipulate forces and distances to see how they affect rotation in real time.
Section Summary
- Statics is the study of forces in equilibrium.
- Two conditions must be satisfied for equilibrium: zero net force and zero net torque.
- The first condition of equilibrium is that the net external force acting on the system is zero:
[latex]\text{net}\,\vec{F} = 0[/latex]
Conceptual Questions
- What can you say about the velocity of a moving body that is in dynamic equilibrium? Draw a sketch of such a body using clearly labeled arrows to represent all external forces on the body.
- Under what conditions can a rotating body be in equilibrium? Give an example.
Glossary
- static equilibrium
- a state of equilibrium in which the net external force and torque acting on a system is zero
- dynamic equilibrium
- a state of equilibrium in which the net external force and torque on a system moving with constant velocity are zero
a state of equilibrium in which the net external force and torque acting on a system is zero
a state of equilibrium in which the net external force and torque on a system moving with constant velocity are zero
